

Los investigadores se han basado en la forma en que el pequeño caracol manzana hawaiano recoge partículas de comida para diseñar un dispositivo que pudiera capturar partículas de plástico en masas de agua.
Inspirándose en un pequeño y lento caracol, un equipo de científicos han desarrollado un prototipo de robot que podría recoger microplásticos de la superficie de océanos, mares y lagos.
El diseño del robot se basa en el caracol manzana hawaiano (Pomacea canaliculate), un caracol común de acuario que utiliza el movimiento ondulante de su pie para impulsar el flujo de la superficie del agua y succionar partículas flotantes de comida.
En la actualidad, los dispositivos de recogida de plásticos se basan principalmente en redes de arrastre o cintas transportadoras para recoger y retirar del agua los residuos plásticos de mayor tamaño, pero carecen de la escala necesaria para recuperar los microplásticos. Estas diminutas partículas de plástico pueden ser ingeridas y acabar en los tejidos de los animales marinos, entrando así en la cadena alimentaria, donde se convierten en un problema para la salud de los seres humanos. Los residuos plásticos constituyen el 80% de toda la contaminación marina, con entre 8 y 10 millones de toneladas métricas de plástico que acaban en el océano cada año, según el Consejo Económico y Social de las Naciones Unidas.
«Nos inspiramos en la forma en que este caracol recoge partículas de comida en la interfaz [agua y aire] para diseñar un dispositivo que pudiera recoger microplásticos en el océano o en la superficie de una masa de agua», explica Sunghwan «Sunny» Jung, profesor y director de estudios de posgrado del Departamento de Ingeniería Biológica y Medioambiental de la Facultad de Agricultura y Ciencias de la Vida (CALS) de la Universidad de Cornell, en Estados Unidos. Jung es el autor principal del estudio publicado en Nature Communications.
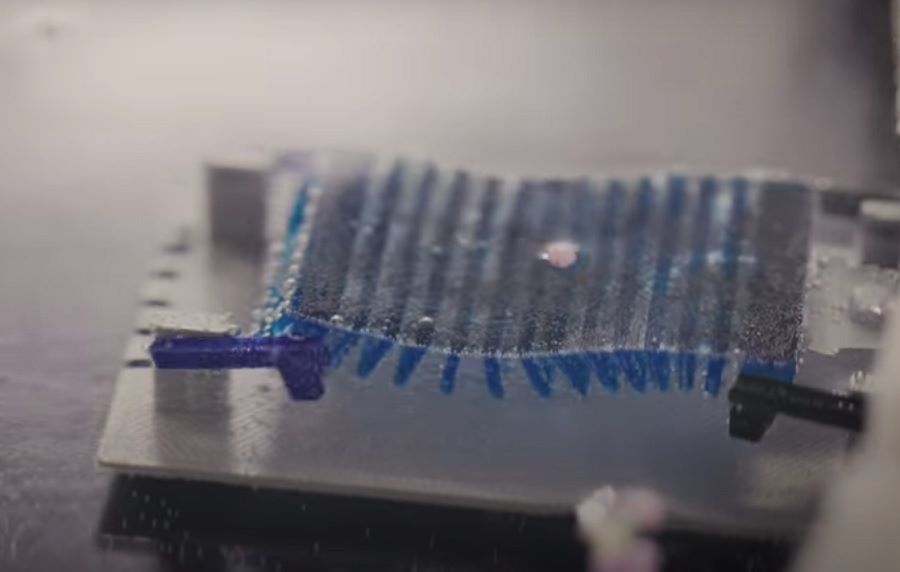
El prototipo, modificado a partir de un diseño existente, tendría que ampliarse para ser práctico en un entorno real. Los investigadores utilizaron una impresora 3D para fabricar una lámina flexible en forma de alfombra capaz de ondularse. Una estructura helicoidal en la parte inferior de la lámina gira como un sacacorchos para hacer que la alfombra ondule y cree una onda móvil en el agua.
Analizar el movimiento del fluido fue clave para esta investigación. «Necesitábamos entender el flujo del fluido para caracterizar el comportamiento del bombeo», explica Jung. El sistema de bombeo de fluidos basado en la técnica del caracol está abierto al aire. Los investigadores calcularon que un sistema cerrado similar, en el que la bomba estuviera encerrada y utilizara un tubo para aspirar agua y partículas, requeriría grandes aportes de energía para funcionar. En cambio, el sistema abierto similar al del caracol es mucho más eficiente. Por ejemplo, el prototipo, aunque pequeño, funciona con sólo 5 voltios de electricidad sin dejar de aspirar agua con eficacia, explica Jung.
Debido al peso de la batería y el motor, es posible que los investigadores tengan que acoplar un dispositivo de flotación al robot para evitar que se hunda, explica Jung.
Artículos relacionados
 Usan Inteligencia Artificial para identificar microplásticos
Usan Inteligencia Artificial para identificar microplásticos Desarrollan una proteína capaz de eliminar microplásticos a temperatura ambiente
Desarrollan una proteína capaz de eliminar microplásticos a temperatura ambiente Un estudio encuentra microplásticos en las bebidas envasadas
Un estudio encuentra microplásticos en las bebidas envasadas Desarrollan un hidrogel capaz de eliminar los microplásticos del agua
Desarrollan un hidrogel capaz de eliminar los microplásticos del agua El creador de un sistema para la eliminación de microplásticos del agua, nominado a joven inventor del año
El creador de un sistema para la eliminación de microplásticos del agua, nominado a joven inventor del año Una tecnología que elimina los microplásticos del agua gana el eAwards Spain 2021 de fundación everis
Una tecnología que elimina los microplásticos del agua gana el eAwards Spain 2021 de fundación everis